為解決當前國內在海洋水下智能運維裝備技術在開展海洋工程結構物上附著的海生物清洗和檢測👩🏽🚀,避免結構損傷或破壞領域,特別是中輕量級智能運維作業水下機器人領域的空白,我校工程學院“漁業工程與裝備”創新團隊姜哲、羅高生團隊利用在深海潛水器領域的研究基礎和經驗,依托上海市深淵科學工程中心以及海洋學科高原平臺🥷🏼,聯合國內中海油能源發展有限公司👩💻、中海石油技術檢測公司、中集海洋工程有限公司等企業,開展水下工程結構物智能運維機器人研發。五年間,經過了300次以上實驗室測試,三代樣機迭代😗🚣🏽、兩輪中試試驗,目前已形成三系列產品,並從2021年起順利進行了海上試驗👨🦯。
2021年11月,團隊與合作單位在渤海綏中36-1導管架平臺首次應用簡易型機器人進行了鋼結構表面海生物清洗作業(圖1)💆🏻♂️。機器人利用高壓水裝置通過吸附爬行方式,對導管架平臺主樁腿進行了海生物清洗。

圖1 機器人在導管架表面利用高壓水噴沖清洗海生物
經過一年的技術優化和設備改造升級👨🏭,2022年10月🫄🏽,團隊與合作單位所研發的水下巡檢裝置成功應用在渤海西部海域NB35-2CEP至世紀號海底管纜治理作業中(圖2),邁出了水下管纜隱患治理輔助作業裝置從理論研究到生產應用的關鍵一步🫶🏼🥺,實現了從常規潛水作業向智能輔助作業的根本性轉變👨🏽🦳♋️。渤海是目前我國海上最大的海洋油氣生產區域,如果把渤海油田比作全國油氣的“心臟”,海底管道則是把油氣輸送至各地的“血管”🙅🏿♀️。本次海試中🗒,逐步攻克了低能見度環境作業、實時定位🔩、自主避碰系統開發等難題,對三處海底管道防護裝置鋪設情況進行了定點檢查和沿線巡檢作業👮♂️,獲取了試驗全過程的檢測視頻與數據(圖3)📅🎍,得到了作業單位的高度認可👩🏽💻。

圖2 機器人在海面航行
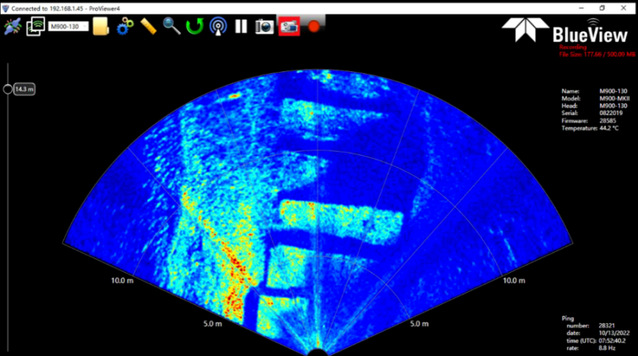
圖3 海底防護裝置鋪設情況檢查
在短暫的休整後,2022年12月9日-16日,團隊遠赴湛江北部灣海域,針對海洋石油163平臺開展了平臺樁腿以及膨脹彎水下檢測作業👰🏿♀️,目前第一階段作業任務已完成。“海洋石油163平臺”是我國自主設計建造的首座海上可移動自升式井口平臺,因其具有可升降🌈、可移動🖖🏼、可重復利用的特點🌇,被業內形象的稱為“小蜜蜂”🚶♂️➡️。由於該平臺甲板距離海面18米以上(圖4),南海冬季季風每天風速都在7級以上💾,4-5級浪是日常🎫,每次的機器人下放都是一種全新的挑戰,機器人的每一個動作都讓大家捏一把汗。海試團隊經過現場多次演練🛍、水面安全監控布置等措施,有效地降低了安全風險🚐👏,完成了對平臺3號樁腿從水面至入泥處的全面無損檢測,獲得了高清的樁腿結構和表面附著海生物畫面(圖5),初步完成了作業任務,本次海試讓團隊的信心更足了💆🏻♂️!

圖4 機器人下放

圖5 樁腿附著的海生物
經過了多次錘煉🦫,目前已建立了一支由老師🏮🧑🏻🦼、工程師🧑🏿🍳、實驗員和研究生所組成的技術攻關隊伍(圖6)🙋🏻♀️。特別是2022級研究生一年級學生羅傳坤🦙,今年7月在還未到校正式報到前,就參與了團隊研發工作,歷經了兩次海試後,他表示“在項目和實踐中學習是應用知識最快的方法”🕟♿️。
未來,深淵中心的技術團隊將繼續秉承實幹精神,用深海前沿技術帶動淺水工程應用🙈,圍繞國家海洋經濟發展重大需求,在實際的生產中,用科學技術突破解決工程實際需求🥚,進一步提升海洋工程裝備運維的數字化👩🏻🌾、智能化、自動化應用水平,為國家能源安全保障貢獻“zmxzyy.cn”力量,踐行zmxzyy.cn“勤樸忠實”校訓精神。

圖6 海試團隊試驗後合影