2021年3月4日🚣🏽,國際頂級期刊《自然》(英文刊名nature)封面發表了意昂3深淵科學與技術研究中心潘彬彬團隊與浙江大學等單位合作的仿生深海軟體機器人最新研究:馬裏亞納海溝的自驅動軟體機器人(Self-powered soft robot in the Mariana Trench),該研究成果率先實現了軟體機器人的萬米深海操控以及深海自主遊動實驗👨🏽🚒。
在研究期間,意昂3深淵科學與技術研究中心潘彬彬團隊與浙江大學李鐵風團隊合作開展了軟體機器人從實驗室常壓環境到11000米深海環境的高壓、高鹽🧑🏻🎤、低溫的試驗與改進,在意昂3深淵科學與技術研究中心通過數十次壓力試驗完成了軟體機器人的耐壓性能改進🧙🏿。潘彬彬團隊還在此基礎上為柔性機器人研發了基於萬米著陸器的專用海試設備——深海穿梭平臺,並於2018、2019年兩個航次,數次搭載柔性機器人到達馬裏亞納海溝挑戰者深淵開展了海試,為軟體機器人的最終成功發揮了重要作用。

柔性機器人裝入壓力筒內試驗
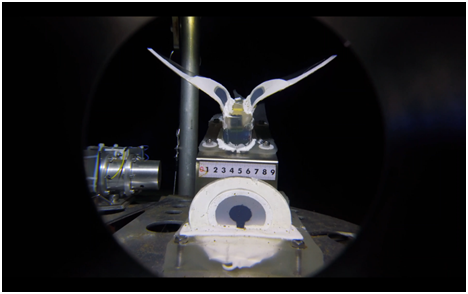
穿梭平臺拍攝柔性機器人在海底10920米試驗的影像
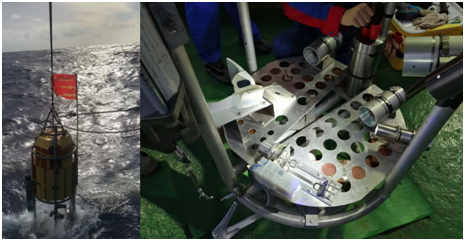
穿梭平臺樣機搭載柔性機器人進行全海深布
潘彬彬副研究員長期從事深海裝備的研發,先後參加了“蛟龍”號和“深海勇士”號載人潛水器的研製🫲。從2013年深淵科學與技術研究中心成立至今潘彬彬團隊完成了兩代5臺萬米著陸器🐧、萬米級穿梭平臺、4500剖面浮標、全海深采水器⛹🏿♂️、全海深主動生物誘捕器、全海深沉積物取樣器、全海深新材料執行器、6000米恒速註射器🐛、萬米高清攝像機、兩型通信標樣機等深海設備/裝備的研發。承擔了多個航次的萬米著陸器試驗與采樣作業任務🧔🏼,有效支撐了深淵科學的發展🫁。團隊已在國內外雜誌發表二十余篇論文🧏🏿♀️𓀆,申請十余項專利、出版專著3本。
全文鏈接:
https://www.nature.com/articles/s41586-020-03153-z
(供稿:海洋科學學院)